The Brains Behind the Boat
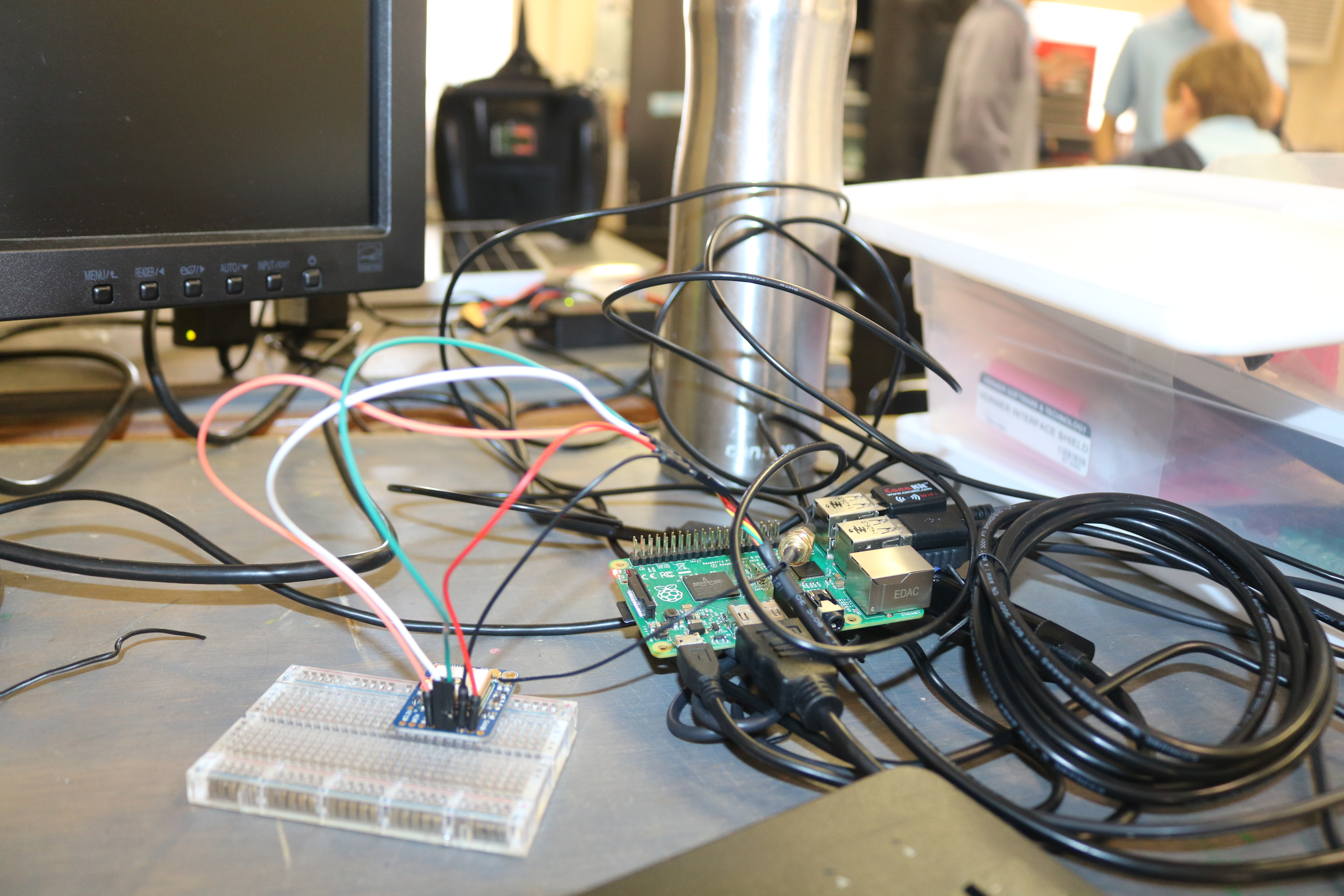
Our Technical Team has been tirelessly working and gained communication between the Raspberry Pi and our three Vernier probes. The Raspberry Pi brain handles data collection and GPS redundancy. This allows for all our data to be not only geographically stamped, but also time-stamped. Our other brain, the Pixhawk, controls navigation, communication to the ground station, reaching waypoints, and has an additional GPS. This will allow MOSES to move autonomously. The Pixhawk carries out an algorithm that uses position data as an input and outputs motor commands to move MOSES to a waypoint.