
Powering Ahead
Sensor Team:
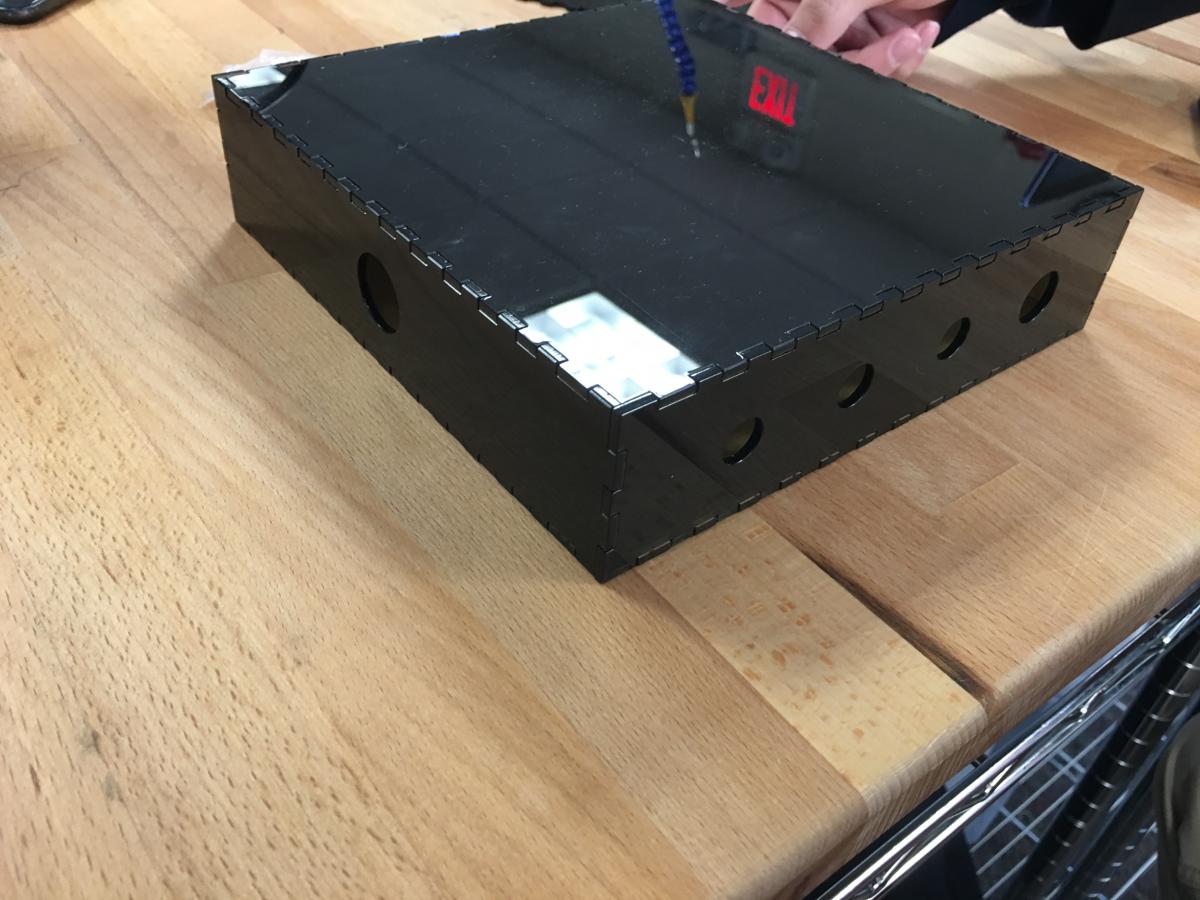
Our first prototype “sensor box” has been completed but we have recently changed our shape to a large tube. This tube idea was taken from the OpenRov that was ordered by the Underwater ROV team. We are working on gasketing the tube using various programs such as XQuartz and Inkscape to work with the Full Spectrum Laser. On the technical side, we got our sensors communicating with a master Arduino to allow us to read data more efficiently. We are currently working on combining all the sensor readings with GPS readings.
Sampler Team:
 The Sampler Team has been working on wireless communication. Over the past week, we have used XBee to communicate wirelessly. The XBees communicate with each other through serial communication. As of now, we have linked the XBees to our solenoid valve water collection unit. Now, we are designing a second water collection unit for the underwater ROV as our current design is slightly heavy. Progressing forward, we have brainstormed a couple ideas that involve 3D printing and underwater servos. Our group has thus far completed the solenoid design and successfully completed wireless communication. We hope to finish the underwater design over break and have water collection units for both the underwater ROV and the surface ROV.
The Sampler Team has been working on wireless communication. Over the past week, we have used XBee to communicate wirelessly. The XBees communicate with each other through serial communication. As of now, we have linked the XBees to our solenoid valve water collection unit. Now, we are designing a second water collection unit for the underwater ROV as our current design is slightly heavy. Progressing forward, we have brainstormed a couple ideas that involve 3D printing and underwater servos. Our group has thus far completed the solenoid design and successfully completed wireless communication. We hope to finish the underwater design over break and have water collection units for both the underwater ROV and the surface ROV.
Navigation Team:
We are the Interface/GPS/Data logging group. We have merged with a part of the sensor team to combine our GPS and Data logging with their array of sensors. Thus far both of groups have finished their individual components of the project. Our new challenge is to get our two designs working together. After this our next goal is to integrate the finished product to each of the ROV designs.
Underwater ROV Team:
 The Underwater ROV group has finished construction of the OpenROV. We have conducted initial tests and we have found that the ROV is operational in fresh water. An issue arose surrounding the mobility of the camera and was resolved by re-wiring the servo and the board. Moving forward, the next step is to harden up the motors for use in seawater. Then to start testing the ROV in Sippican Harbor. We will also continue integrating sensors and the water sampler into the OpenROV.
The Underwater ROV group has finished construction of the OpenROV. We have conducted initial tests and we have found that the ROV is operational in fresh water. An issue arose surrounding the mobility of the camera and was resolved by re-wiring the servo and the board. Moving forward, the next step is to harden up the motors for use in seawater. Then to start testing the ROV in Sippican Harbor. We will also continue integrating sensors and the water sampler into the OpenROV.
Surface ROV Team:

The surface ROV team has been progressing well throughout December, accomplishing many of our goals. We were able to complete the coding for the motors, so that one joystick can control two motors in both directions, including turning without going forward or backward. We are in the process of working on a design to raise and lower the sensor array, and ultimately make all of these functions work wirelessly. The current problem we are working on is the reel, and the wireless functionality. With one week left until break, we hope to finish our reel design and attach our motors before the holidays.