January update: Well Underway
Since the past couple of weeks, each team has allotted specific tasks for its team members to increase productivity and efficiency. Putting our plans into action has required each team member to step up to their tasks and dedicate more time to the project. Therefore, instead of meeting every Thursday morning only, we now have mandatory team meetings every Wednesday and additional project work time on other weekdays as well. Our new implemented plan allows us to get more work done and communicate our progress better.
Each team is well underway with their aspect of the project and hopes to put their technology to the test and finalize designs.
After completing assembly and initial calibration of the drone, Team A has faced some technical difficulties but is on the verge of successful flight.
Using the Mission Planner software, the team made adjustments to the calibration of the drone. During the first attempts to fly the drone, the team encountered difficulties in maneuvering the drone in flight due to some problems with the remote control and flight mode. After making some changes to the calibration, the drone was able to stay suspended in the air for some time, but making turns became the problem. With the assistance of a UCI (University of California, Irvine) graduate student, the team is making more adjustments to flight control and is moving in the right direction, towards autonomous flight. The team hopes to successfully fly the drone in the near future and fully utilize the Pixhawk system. Team A is also looking into other types of drones that are pre-built and can be programmed for autopilot more quickly.
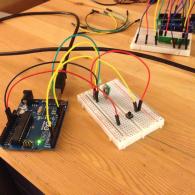
Team B has successfully implemented communication systems for receiving and sending signals. Ali Shelton from Team B reflects on their progress: “As of right now team b is working on serial communications between two arduino micro controllers. We have worked with the arduino uno and rf link chips in order to complete communications. So far, we have successfully been able to send signals across relatively short distances. Our current goal is to compact the entire system, make it mobile, and test furthering the distance of transmission and reception.”
With Team B’s successful transmission and reception of signals, the communication design of the project is almost ready to be tested and finalized.
Alex Chang from Team C describes the team’s progress so far: “Team C currently is trying to help team A and B in configuring their hardware so we can put our software to communicate with the other components of the project. We currently have the user interface for the first responders created and mocked up, and we have a first version of the software that will probably be used on the arduino boards that should handle flight paths, discovery/approach of the distress signal, and taking pictures and sending those back to the base station.”
As team C develops the software, we are looking into options for cameras that would be compatible with the function of the drone.
As we proceed to develop the components of our project, we look forward to having a coherent search and rescue system that would be able to function efficiently.