
Getting Started
We have divided up into 5 subgroups working on separate smaller projects that will be integrated later on in our final product. The five groups are as follows: sensors, sampler, navigation, above water ROV, and underwater ROV. Below are short summaries of where the groups are as of 16 November 2016.
Photos can be found at the following link: https://drive.google.com/drive/folders/0BxEULSBiFw7tSXBhODNTTmcwZlk?usp=sharing
Sensor Team:
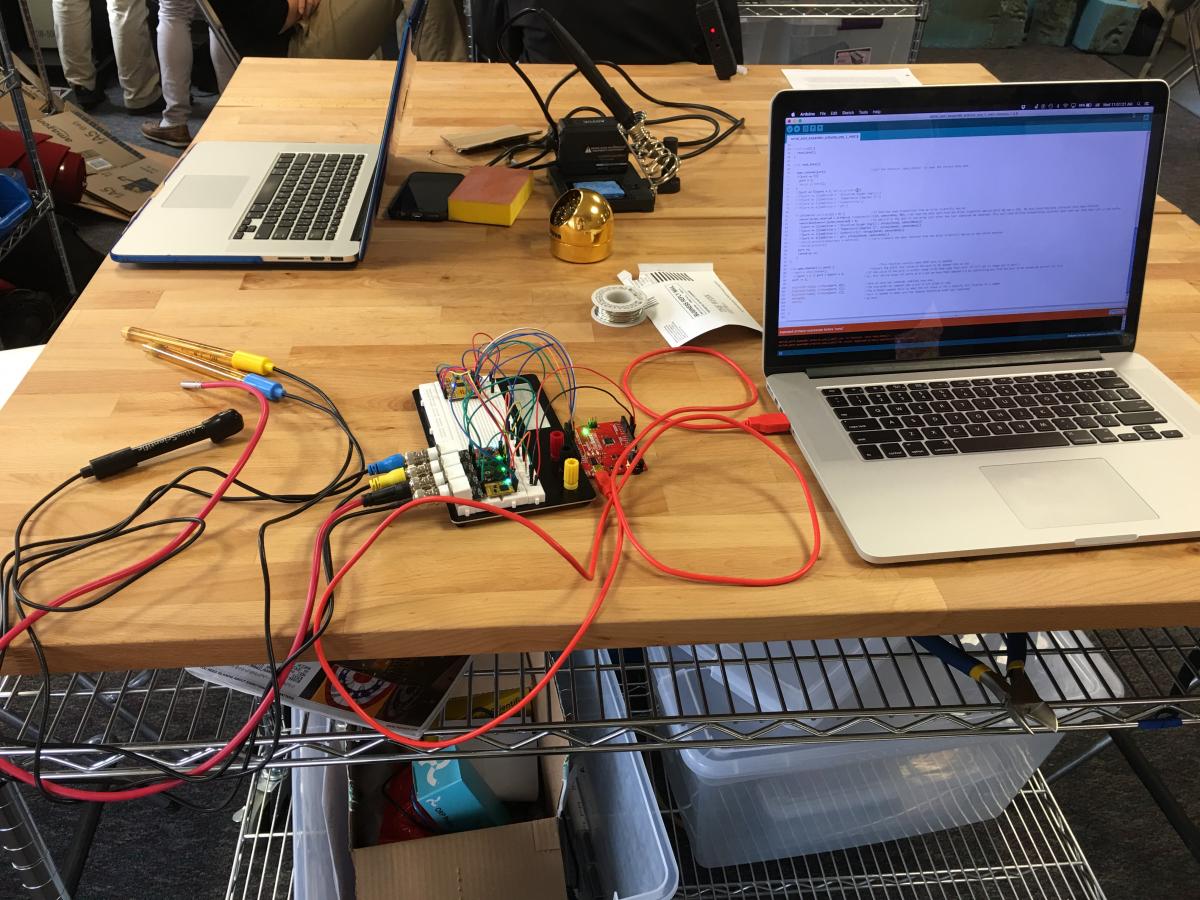 We are making progress with integration of the sensors for the ROV. We are also creating a program to store data on an SD card and report GPS coordinates. As for the prototypes, we have two being built right now. As soon as each group has completed their task, we will begin to integrate all the technology into one functioning vehicle for testing.”
We are making progress with integration of the sensors for the ROV. We are also creating a program to store data on an SD card and report GPS coordinates. As for the prototypes, we have two being built right now. As soon as each group has completed their task, we will begin to integrate all the technology into one functioning vehicle for testing.”
Sampler Team:
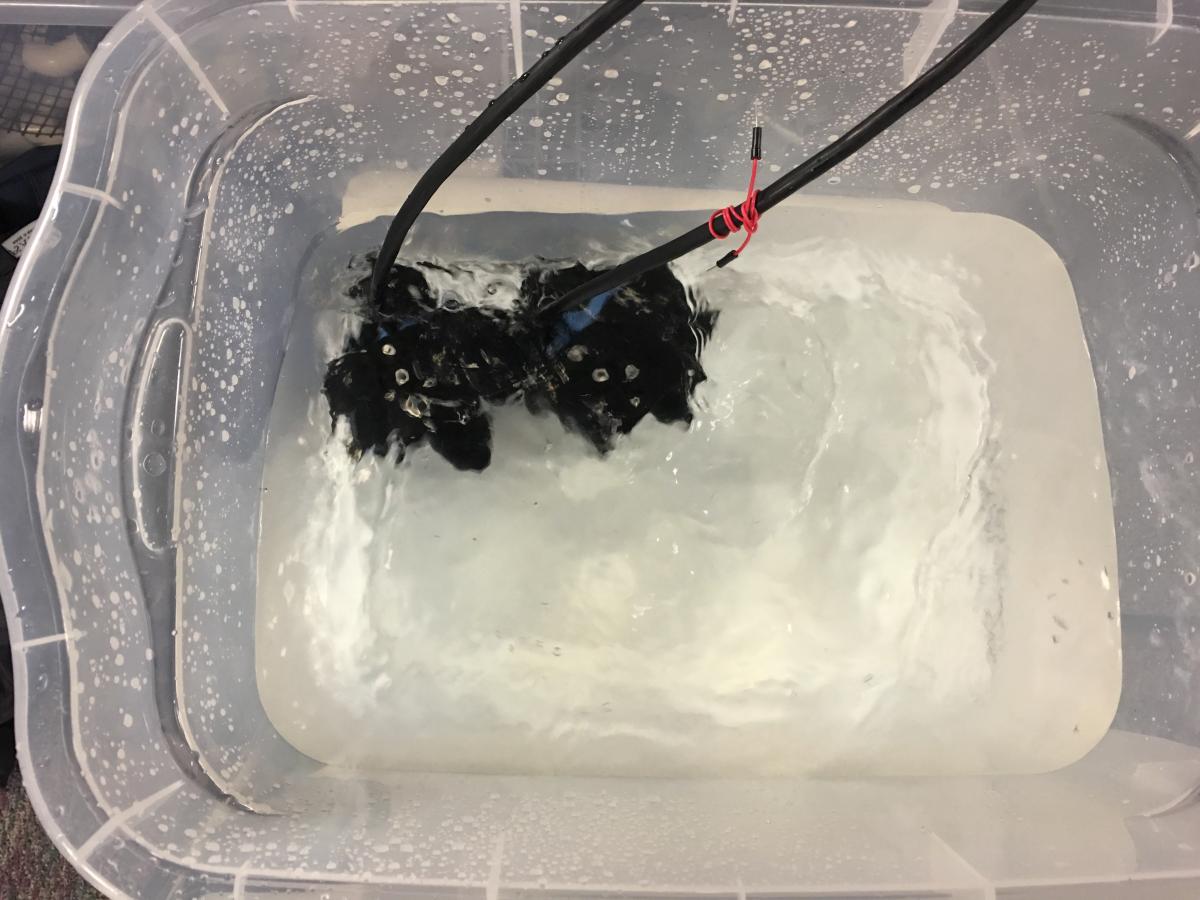
We decided on an electronic sampler made up of a piece of PVC and two Solenoid Valves. Once the sampler reaches a certain depth we will open the valves remotely for 1 minute. The motor will be powered by the 12v power onboard the ROV. We have successfully coded an Arduino board so that each solenoid switch is controlled by a button through a Sparkfun Beefcake relay. We believe that the solenoid switches are waterproof but the company has not confirmed nor denied this. We may have to shrink wrap the entire casing as the connections must be waterproof. We are now trying to configure a Digi International XBee to our Arduino board so we can communicate with the sampler remotely.
Video of working solenoid valves.
Navigation Team:
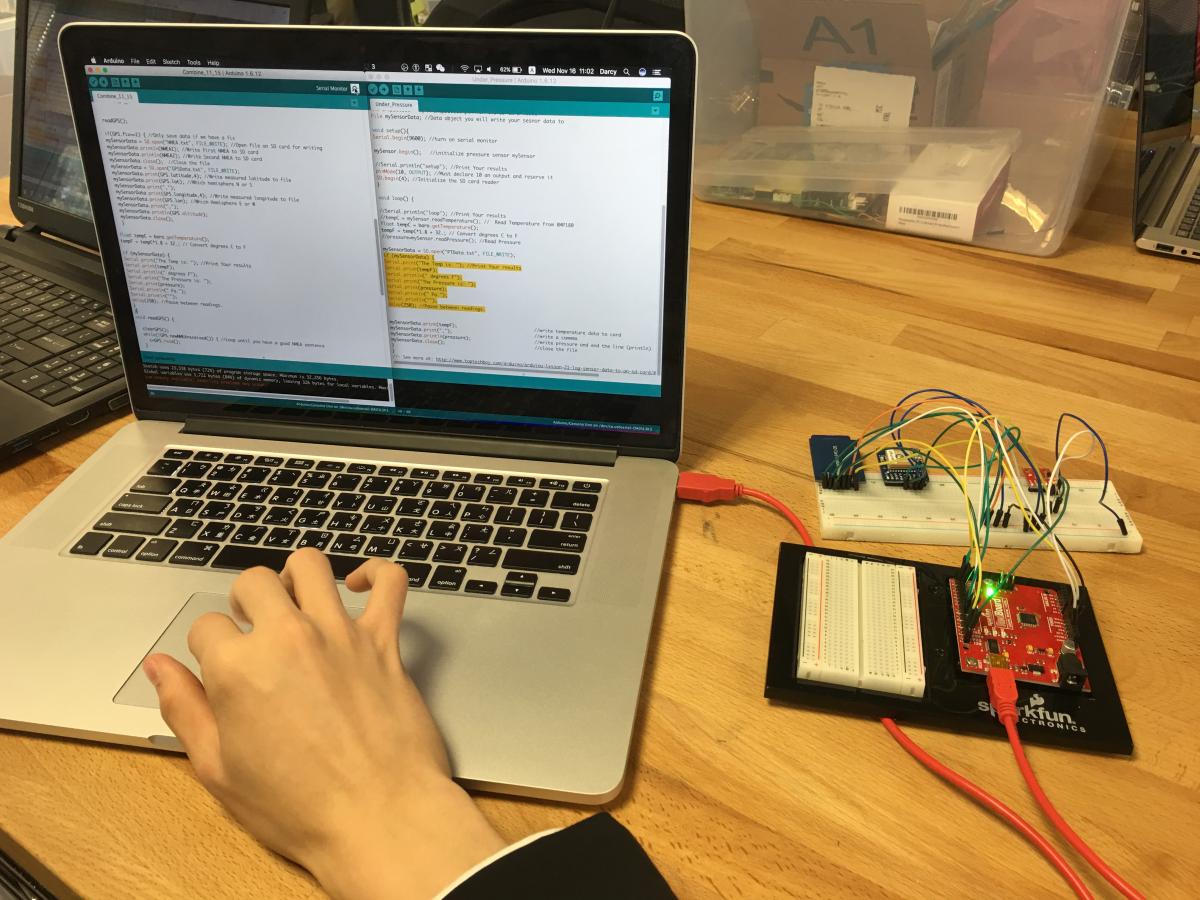 “We are the interface/ GPS/ data logging group. Our goal is to get all the components working together, and in the end being able to record various types of data onto a SD card. So far, we have completed the GPS code. Now we are working on inputting data from two sensors (a GPS chip and a pressure sensor) into a single SD card. Our next goal is to collaborate with the sensor team to combine our technologies.”
“We are the interface/ GPS/ data logging group. Our goal is to get all the components working together, and in the end being able to record various types of data onto a SD card. So far, we have completed the GPS code. Now we are working on inputting data from two sensors (a GPS chip and a pressure sensor) into a single SD card. Our next goal is to collaborate with the sensor team to combine our technologies.”
Underwater ROV Team:
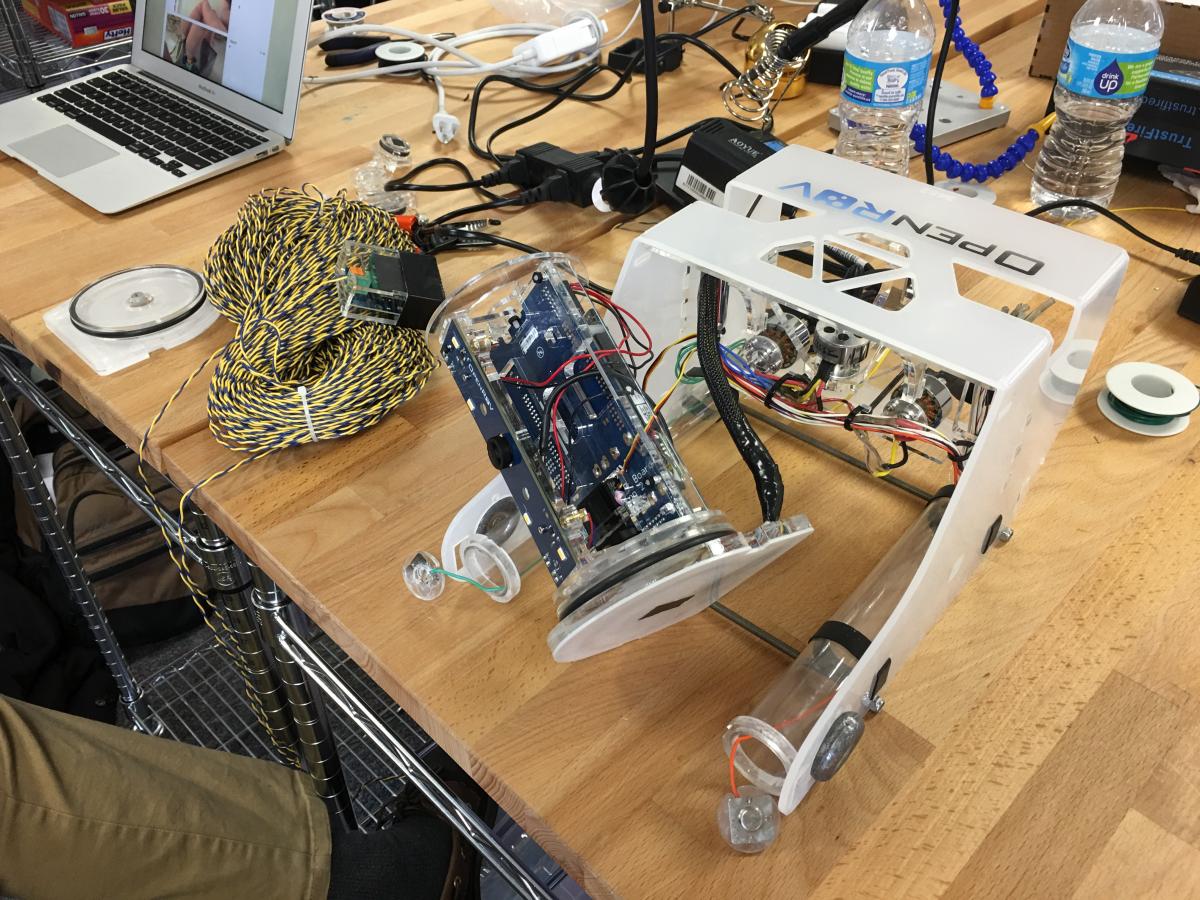
“The underwater ROV group is using the openROV kit to investigate a possible solution. In the process of assembling openROV we are honing our engineering skills, getting exposure to waterproofing, underwater communication methods and improving our knowledge of underwater navigation. We hope our final solution will be a combination of the openROV and other sensors and parts.”
Surface ROV Team:
“The above water ROV team has successfully constructed a water tight hull with 77 lbs of buoyancy. We are very close to finalizing the code to control the Blue Robotics T200 motors. We have also started designing the winch mechanism to deploy the sensor payload. The current design for the winch mechanism is to have a spool of wire which conducts power to the payload connected to a battery onboard using a slip ring.”